 |
|---|
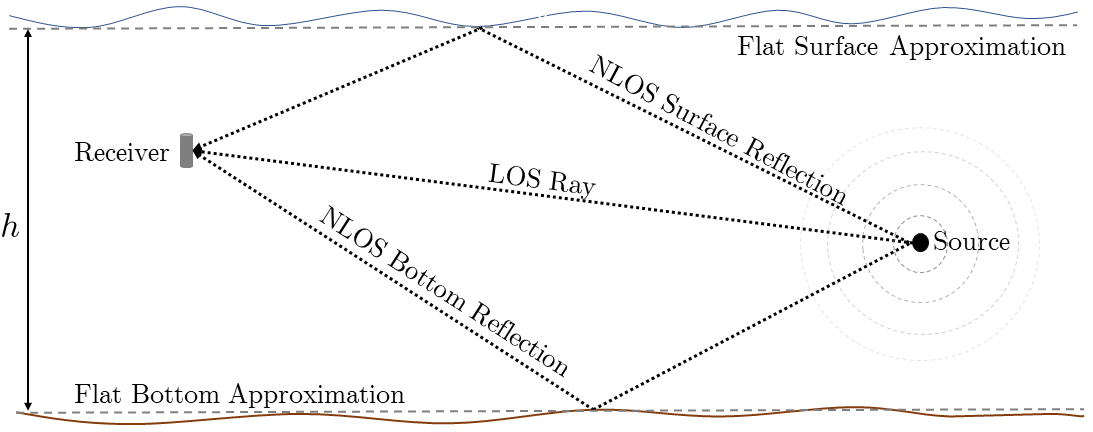
| A 2-dimensional illustration of the three-ray model. When the surface and bottom are approximately flat in the operational area, this model enables non line-of-sight (LOS) based localization in the potential absence of the LOS signal component, e.g., due to an occluder. |
This package contains a MATLAB code implementation of the localization method and the computation of the performance bound presented in [1].
To download the Matlab package, click here.
Related Papers
[1] Weiss, A., Arikan, T., Vishnu, H., Deane, G. B., Singer, A. C. and Wornell, G. W., “A Semi-Blind Method for Localization of Underwater Acoustic Sources”, IEEE Trans. on Signal Processing, vol. 70, pp. 3090–3106, May 2022. arXiv
[2] Weiss, A., Arikan, T., and Wornell G. W., “Direct Localization in Underwater Acoustics via Convolutional Neural Networks: A Data-Driven Approach”, accepted for publication in Proc. of IEEE Int. Workshop on Machine Learning for Signal Processing (MLSP), June 2022. arXiv